太原网站建设 thinkphp3.2肇庆疫情最新消息
DJI ROS dji_sdk 源码分析|整体框架
- launch文件
- CMakeLists.txt
- cpp文件
- main.cpp
OSDK 是一个用于开发无人机应用程序的开发工具包,基于OSDK 开发的应用程序能够运行在机载计算机上(如Manifold 2),开发者通过调用OSDK 中指定的接口能够获取无人机上的各类数据,经开发者设计的软件逻辑和算法框架,执行相应的计算和处理,生成对应的控制指令控制无人机执行相应的动作,实现如自动化飞行、负载控制和视频图像分析等功能。
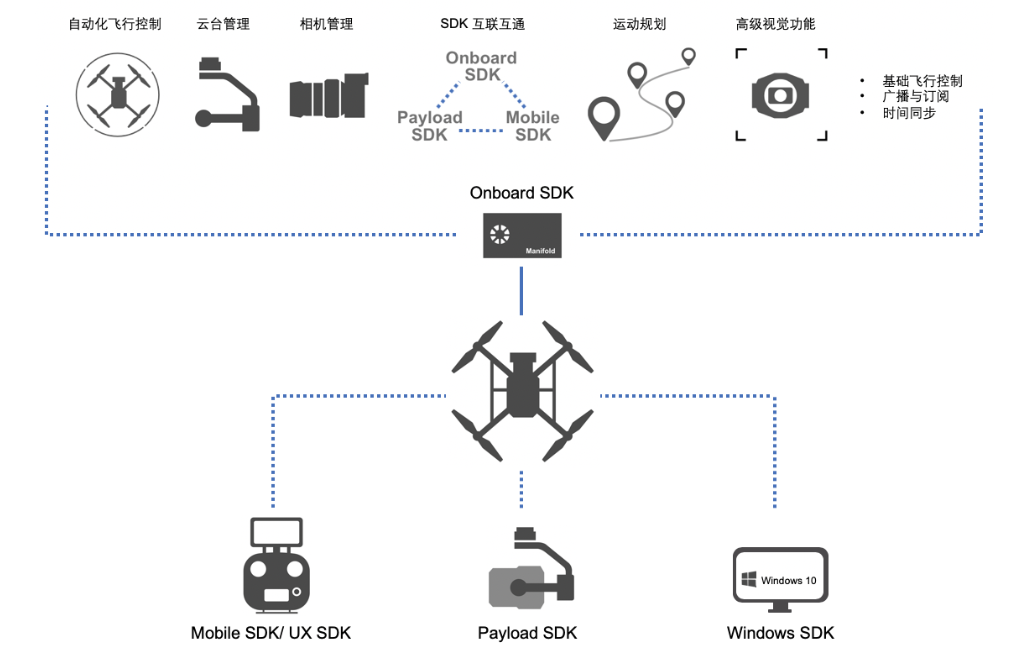
本篇博客通过对dji_sdk 源码分析梳理出了整体框架。
launch文件
运行ros dji sdk 功能包运行的launch文件仅有一个,在对应文件夹下的 sdk.launch
<launch><node pkg="dji_sdk" type="dji_sdk_node" name="dji_sdk" output="screen"><!-- node parameters --><param name="acm_name" type="string" value="/dev/ttyACM0"/><param name="serial_name" type="string" value="/dev/ttyUSB0"/><param name="baud_rate" type="int" value="921600"/><param name="app_id" type="int" value="123456"/><param name="app_version" type="int" value="1"/><param name="align_time" type="bool" value="false"/><param name="enc_key" type="string" value="abcd1234"/><param name="use_broadcast" type="bool" value="false"/></node>
</launch>
节点的名字为dji_sdk_node ,之后可以看CMakeLists.txt 可以看这个节点对应的 cpp文件。
节点有几个参数,需要配置。
- acm_name 不用管
- serial_name 串口的名称
- baud_rate 波特率
- app_id 申请的app id
- app_version 不用管
- align_time 是否开启时间同步
- enc_key 申请的app id 对应的KEY
- use_broadcast 是否使用广播,默认不使用
CMakeLists.txt
前面的依赖配置就不看了,直接看 exe生成部分
add_executable(dji_sdk_nodesrc/main.cppsrc/modules/dji_sdk_node_control.cppsrc/modules/dji_sdk_node_services.cppsrc/modules/dji_sdk_node.cppsrc/modules/dji_sdk_node_mission_services.cppsrc/modules/dji_sdk_node_subscriber.cppsrc/modules/dji_sdk_node_publisher.cppsrc/modules/dji_sdk_node_mobile_comm.cppsrc/modules/dji_sdk_node_payload_comm.cppsrc/modules/dji_sdk_node_time_sync.cpp)
依赖的cpp文件在 src文件夹下和src/modules文件夹下
cpp文件
main.cpp
首先来看 main.cpp
该文件完成 ros的最基础功能,然后对DJISDKNode类的实例化
#include <dji_sdk/dji_sdk_node.h>
包含dji_sdk_node.h,DJISDKNode类的定义就在这个文件中。
int main(int argc, char **argv) {ros::init(argc, argv, "dji_sdk");ros::NodeHandle nh;ros::NodeHandle nh_private("~");
ros 节点的初始基本操作
DJISDKNode* dji_sdk_node = new DJISDKNode(nh, nh_private);
对DJISDKNode类的实例化
ros::AsyncSpinner spinner(4); // Use 4 threadsspinner.start();
开启4个线程
ros::waitForShutdown();delete dji_sdk_node;dji_sdk_node = NULL;return 0;
}
结束部分
DJISDKNode类的定义在dji_sdk_node.hpp文件中
其中的实现在主要在dji_sdk_node.cpp中,特殊功能的在modle文件夹下的其它对应cpp文件中实现