成都网站开发的公司百度投诉电话人工客服24小时
PR曲线
1. Robust_Place_Recognition_using_an_Imaging_Lidar
在第三节方法中,提到了一些列处理步骤,分析来与vins相似,在vins中是关键帧检索、特征提取、DBoW查询、描述子匹配、PnP RANSAC求解。
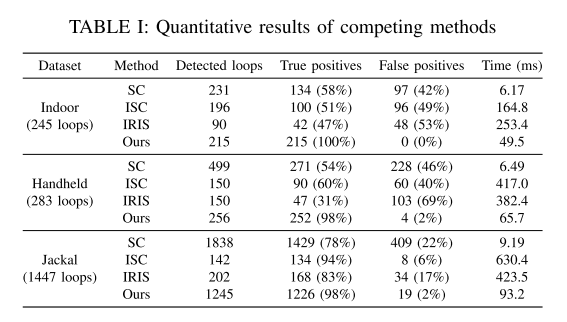
第四节的实验部分,没有绘制pr曲线,而是针对某一次实验计算了总共的loop次数、真阳性和假阳性,
If the position between the matched nodes is less than 2m, we consider this detection a true positive, otherwise a false positive.
如果匹配节点之间的位置小于2m,则认为该检测为真阳性,否则为假阳性。
结论部分,将激光雷达当作深度相机去用,提取DBoW词袋中的点云来查询,其他没区别。
2.Scan context: Egocentric spatial descriptor for place recognition within 3d point cloud map
Visual recognition is popular together with the widespread use of camera sensors, however, it is inherently difficult due to illumination variance and short-term (e.g., moving objects) or long-term (e.g., seasons) changes. Similar environments may occur at different locations often causing perception aliasing.
随着相机传感器的广泛使用,视觉识别变得越来越流行,然而,由于光照的变化和短期(如移动物体)或长期(如季节)的变化,视觉识别本身就很困难。相似的环境可能发生在不同的位置,经常导致感知混叠。